My first PCB
What is this?
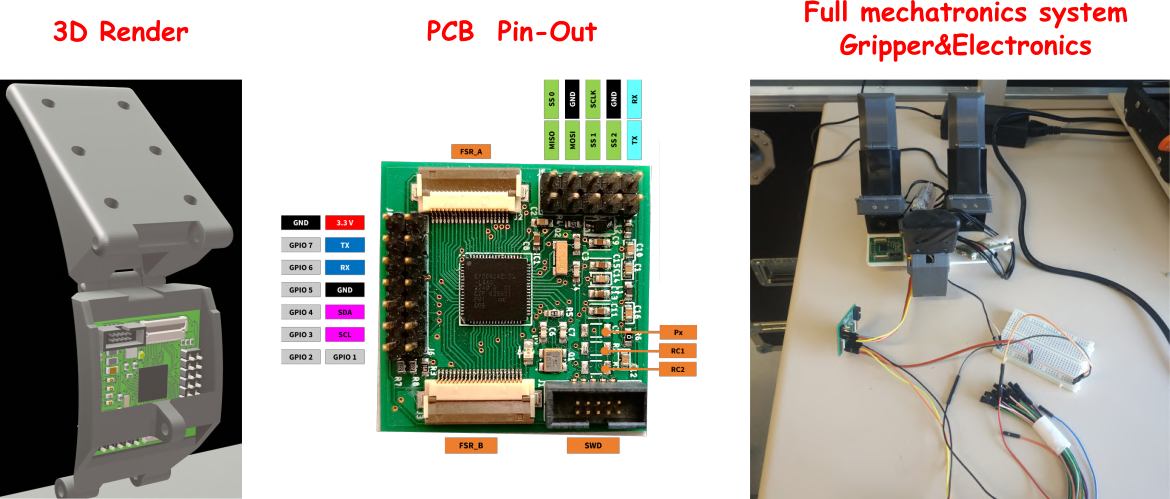
In this project, I designed a printed circuit board (PCB) centered around a PSoC microcontroller. The microcontroller manages data acquisition via a Direct Interface Connection (DIC) conditioning circuit, enabling the system to capture inputs from 30 resistive touch sensors. The processed data is transmitted to a computer in real time using the UART communication protocol.
Key Achievements:
- Designed and manufacturing a PCB for data acquisition from resistive tactile sensors integrated into a robotic manipulator’s gripper. This involved full process design, including component selection, material procurement, and PCB trace routing, it incorporated a PSoC in a QFN package.
- Developed a master-slave architecture in C for ARM, collecting data from multiple sensors via SPI and UART communication, with debugging facilitated by LabView.
Characteristics
- Microcontroller
- Core model: PSoC CY8C4248LTI-L485 (QFN package).
- Operating frequency: 24 MHz (minimum).
- Programming interface: Serial Wire Debug (SWD).
- PCB Specifications
- Layer stackup: 4 layers (Top, Ground plane, Power plane [split into analog/digital/I/O sections], Bottom).
- Dimensions: 35 mm × 35 mm (±3% tolerance).
- Assembly: SMD/SMT components only.
- I/O & Connectivity
- 7 general-purpose GPIO pins.
- Communication protocols: UART, I2C, SPI.
- Dedicated sensor interface: 33 pins (30 for resistive touch sensors, 2 for calibration resistors, 1 for filter capacitor).
- Power
- Supply voltage: 3.3 V DC.
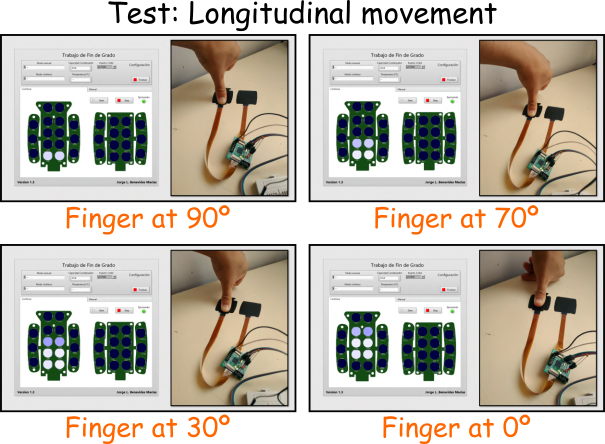
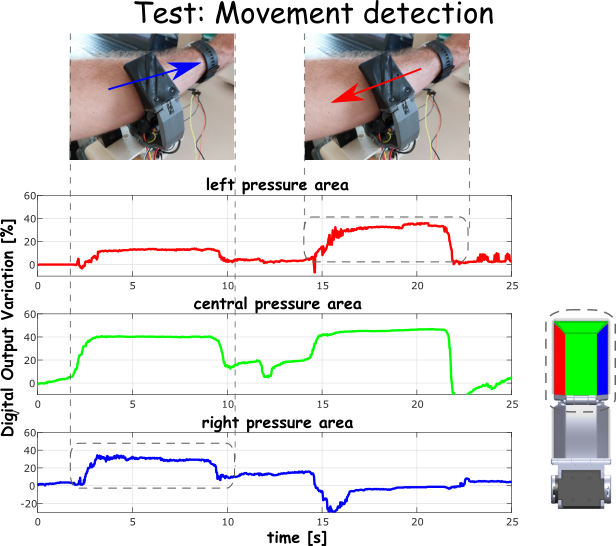
Testing
 |
 |
Results
- Mechatronic System Integration
- Full-Cycle Electronics Development: Delivered a complete design including a bill of materials (BOM), schematic design, and PCB layout.
- High-Frequency Sensor Measurement: Achieved touch sensor sampling at 50 Hz for responsive data acquisition.
- SPI-Based Master-Slave Architecture: Implemented a multi-node communication system using SPI protocol to collect sensor data from multiple sections of a robotic gripper.
- Sensor Characterization: Conducted performance analysis and calibration of resistive touch sensors.
- LabVIEW Data Interface: Developed a LabVIEW program for real-time data visualization, analysis, and storage.